

 ”Bevakad järnvägsövergång med ljud- och ljussignaler”
”Bevakad järnvägsövergång med ljud- och ljussignaler”
Det var det man fick lära sig att det här vägmärket betydde, vad jag minns.
Under alla år av järnvägsbygge i modell så har jag också funderat och tittat på olika modeller av järnvägsövergångar. För vägar och bilar blev det på anläggningen när väl någon form av landskap började ta form, och vägarna korsade naturligtvis järnvägen på inte bara ett ställe utan på flera ställen. Men de järnvägsövergångar som finns i handeln är nästan alltid efter tyska förebilder. Har de bommar, så är de rödvita, och ev. signaler är också tyska. Vill man sen att bommarna ska fungera så finns det flera olika tekniska lösningar med varierande resultat, och pris – inte att förglömma. Många av lösningarna ger inte alls något naturtroget sätt för fällningen av bommarna, och de som har en ”prototyplik” långsam bomfällning kostar en bra slant – och ser tyska ut.
Mitt projekt med fungerande järnvägsövergång började egentligen som en fortsättning på mitt bygge av Signaldekodern. Kunde jag väl styra tågsignaler med dekodern, så kunde jag väl även styra ljussignalen vid en järnvägsövergång, dvs. den för biltrafiken (en vit blink, och två röda blinkade växelvis). Det var ”bara” en fråga om att kunna konfigurera min dekoder att visa just de två signalbilder som vägsignalen behövde.
Obevakad järnvägsövergång
 Ursprungligen var målet att göra en obevakad järnvägsövergång. Då behövdes inga bommar, så det såg överkomligt ut. Jag byggde min egen signal för järnvägsövergången, som hade två röda LED och en vit LED. Och ett vägmärke för obevakad järnvägsövergång sättes upp för bilarna.
Ursprungligen var målet att göra en obevakad järnvägsövergång. Då behövdes inga bommar, så det såg överkomligt ut. Jag byggde min egen signal för järnvägsövergången, som hade två röda LED och en vit LED. Och ett vägmärke för obevakad järnvägsövergång sättes upp för bilarna.
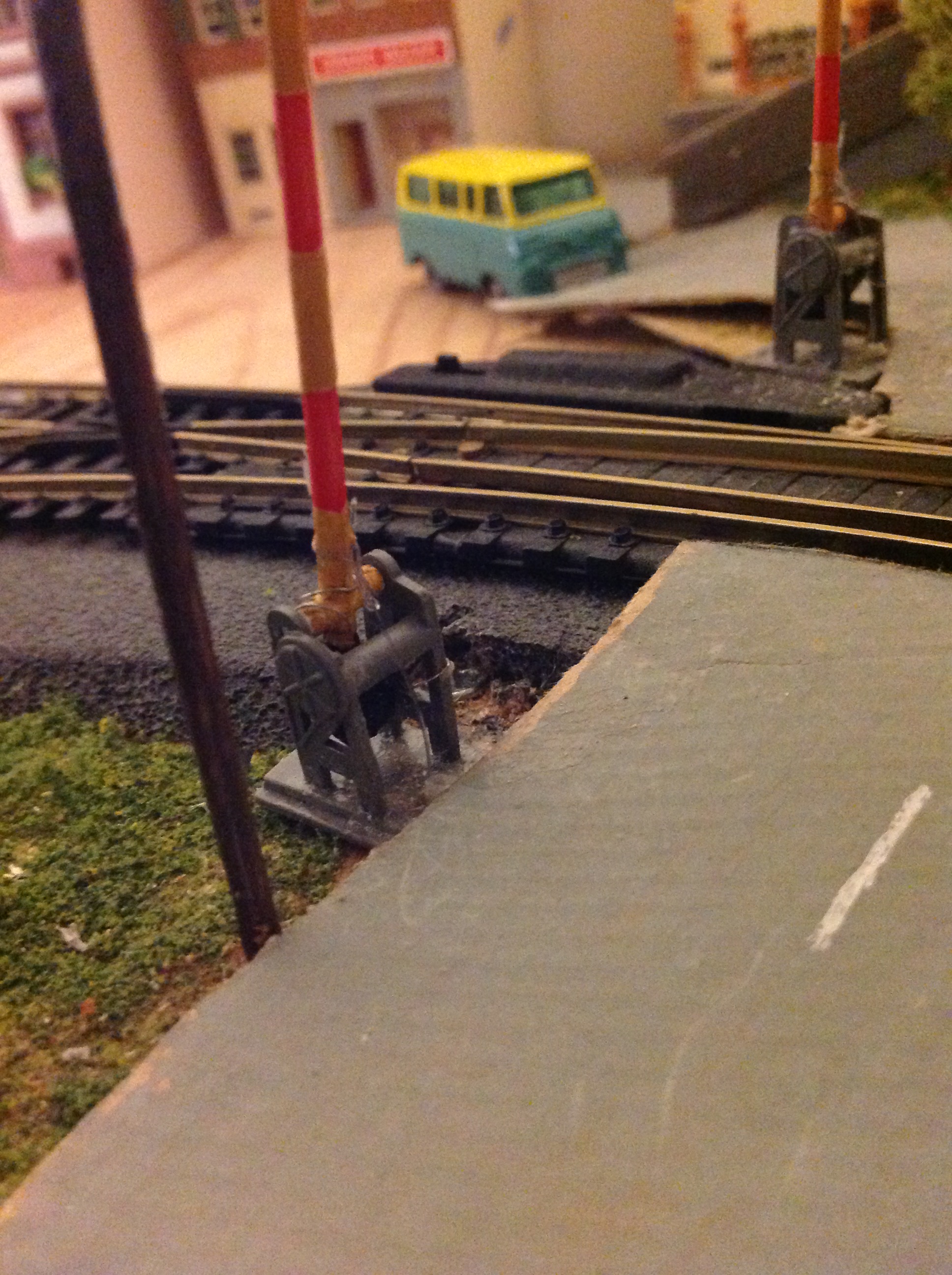
Bommar
Mitt under det projektet fick jag syn på ett par riktigt fina svenska bommar på Tradera. De var visserligen helt utan drivning, men jag kunde inte motstå möjligheten att skaffa dem. Det var totalt två bomm-par, och jag monterade upp dem vid två av vägövergångarna. Nu kunde jag ju inte ha kvar trafikmärken för ”obevakad järnvägsövergång”, så jag fick byta ut trafikmärket till ”bevakad järnvägsövergång”. Det var ju en tämligen enkel justering.
Samtidigt började funderingarna på hur jag skulle kunna styra dem prototyplikt, med långsam fällning och resning. Det gick lätt att manövrera bommarna för hand, men det var ju helt opraktiskt att göra under körning. De fick istället stå still i ett av lägena, antingen nere eller uppe.
Styrning med mico-servo och Arduino-processor

Micro-servo NG90S
Så småningom kom idéen ett styra dem med ett micro-servo. Jag köpte ett pack med 4 micro-servon för några hundralappar (Tower Pro NG90S). Till styrningen av servon kan man använda en Arduino-processor, och i Arduino-projektet finns ett färdigt programbibliotek för servostyrning (Servo Library). Jag skaffade en Arduino-nano processor och började experimentera med styrning servot, för att lära mig hur olika stora utslag av servo-armen kunde programmeras, och även rörelsehastigheten.
Sen återstod den kluriga nöten att knäck; hur skulle jag mekaniskt koppla servot till bommarna?
Bommarna hade inga som helst fästpunkter för någon ev. mekanisk styrning, så det blev att funderat på olika lösningar som dessutom inte skulle störa utseendet för övrigt. Jag valde mellan olika alternativ; skulle sevot dra i båda riktningarna, eller skulle servot dra åt ena hållet och skjuta åt andra? Att dra kan ordnas med någon sorts lina till servo-armen. Men för att skjuta behövs någon stel mekanik, som dessutom ska kunna röra sig i en kvarts-cirkelbana. Helst ville jag slippa stela armar mellan servot och bommarna, därför att de är svårt att fästa dem vid bommarna utan att servo-rörelsen skulle riskera att bryta sönder något på bommarna.
Det jag helst ville åstadkomma var nån form av fjäderbelastning, så att bommarna bara behöver dras av servo:t åt ena hållet och sedan fjädrar tillbaka när dragkraften återgår. Det skulle ge den enklaste styrningen från servo:t. Och då skulle servot dra bommrna nedåt, och fjädringen skulle lyfta dem till sitt viloläge, uppfällda.
Bomstyrning med gitarrsträngsfjäder och fiskelina.
Lösningen blev till slut mycket enkel, och smäcker. Jag fick till en ”hemmagjord” fjäderlösning med hjälp av en bit ”överbliven” gitarrsträng från en stålsträngad gitarr (de olika strängarna har olika styvhet, E, A, D etc., och jag valde den som gav lämplig fjäderverkan). Som draglina till servo:t använde jag en bit tunn fiskelina, som fästes i bommen och i servo-armen. Servo:t monterades under järnvägsövergången. Båda bommarna styrdes av ett och samma servo, så draglinorna från de båda bommarna fick arrangeras och justeras lite för att bomfällningen skulle bli så lika som möjligt på båda sidor om spåret. Efter lite intrimning av servorörelsen fungerade sedan bommarna alldeles utomordentligt.

Micro-servo monterat under järnvägsövergången
När det första bomparet var klart och testkört med så positivt resultat, så gav jag mig direkt i kast med att automatisera det andra bomparet också, med samma principlösning; ett micro-servo, en ”hemmagjord” gitarrsträngs-fjäder; och en fiskelina.
För att styra bommarna, dvs. Arduino processorn och servo:t, så lät jag en (1) ingångssignal på Arduino:n styra servo:t. Hög nivå (1) startade fällning; Låg nivå (0) startade resning. Den ingången kopplades sedan till en ledig utgång på en Signaldekoder, som sedan kan styras separat från datorprogrammet (TrainController).
Jag använder samma Arduino processor till att styra båda bomparen. Jag skrev programkoden till Arduino så att två olika servo:n styrs, oberoende av varandra, och aktiveras av varsin ingångssignal.

Servostyrning med Arduino Nano
Automatisk styrning från datorn
Det hela styrs sedan från datorprogrammet (TrainController), via ett flertal styrfunktioner:
- Styrning av ljussignalen för biltrafiken. Styrs från en signaldekoder, tre utgångar, med två ljusbilder (röd växelblinkning och vit blinkning).
- Styrning av tågsignalen (vägskydd). Styrs från en signaldekoder, en utgång (1=röd; 0=vit).
- Styrning av ljudsignalen. En Arduino-processor med lagrat ”klämt-ljud” aktiveras från en signaldekoder, en utgång.
- Styrning av bomfällning. Styrs från en signaldekoder. En utgång kopplad till servo-styrnings Arduino. (1=fäller bommarna; 0=reser bommarna).
De olika funktionerna aktiveras i tur och ordning av TrainController, då ett tågsätt passerar. Olika aktiveringspunkter har lagts in i blocken i TrainController’s Switch-board, både före och efter vägkorsningen. Om man sedan har kalibrerat lokets hastighetkurva (speed profile), och mätt upp och konfigurerat tågsättens längder, så kommer styrningen av bommarna att kunna ske riktigt verklighetstroget. Vägsignalen slår om i god tid, klockan klämtar, bommarna fälls, och tåget kan passera. När sista vagnen passert reses bommarna igen, klockan tystnar och vägsignalen återgår till vitt blinkande sken.
One Response to Bevakad järnvägsövergång med ljud- och ljussignaler